Layer 1: Edge Intelligence on the F1 Starter Kit
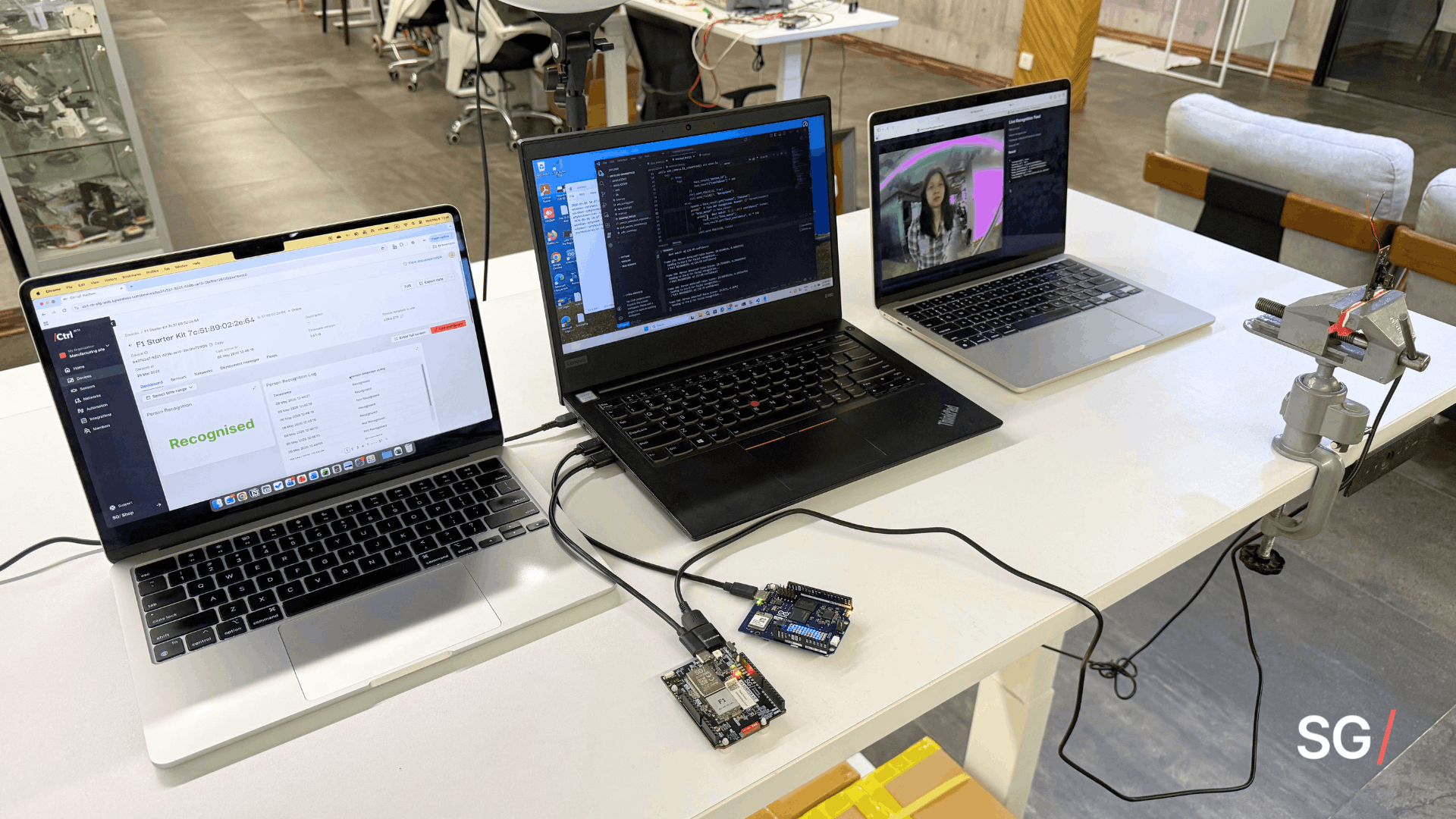
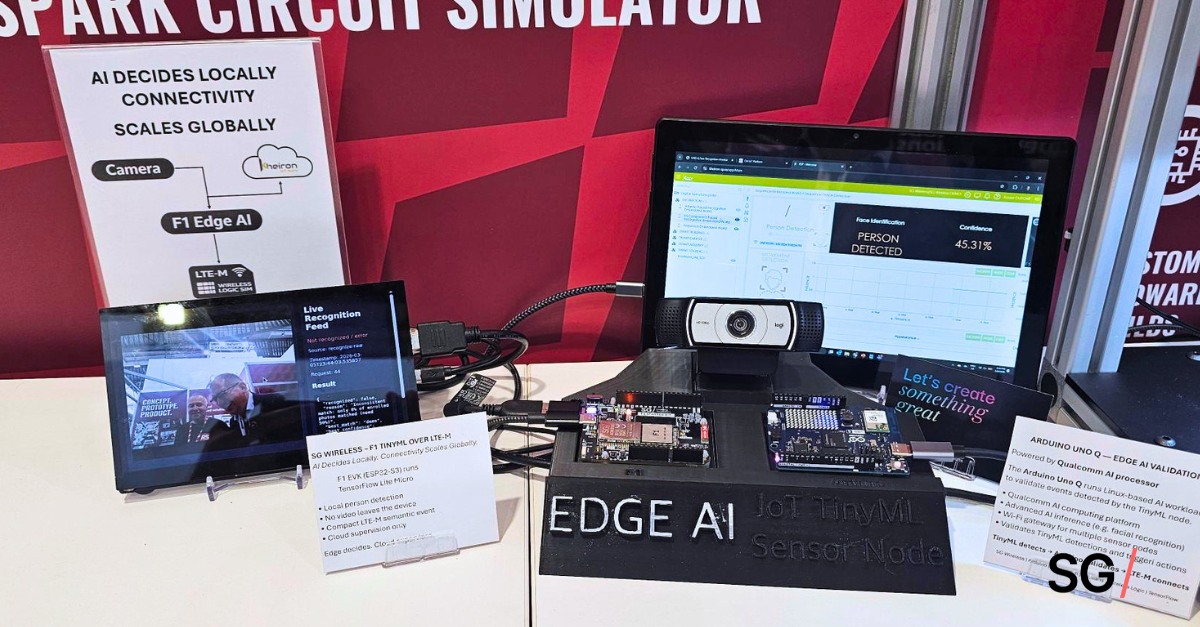
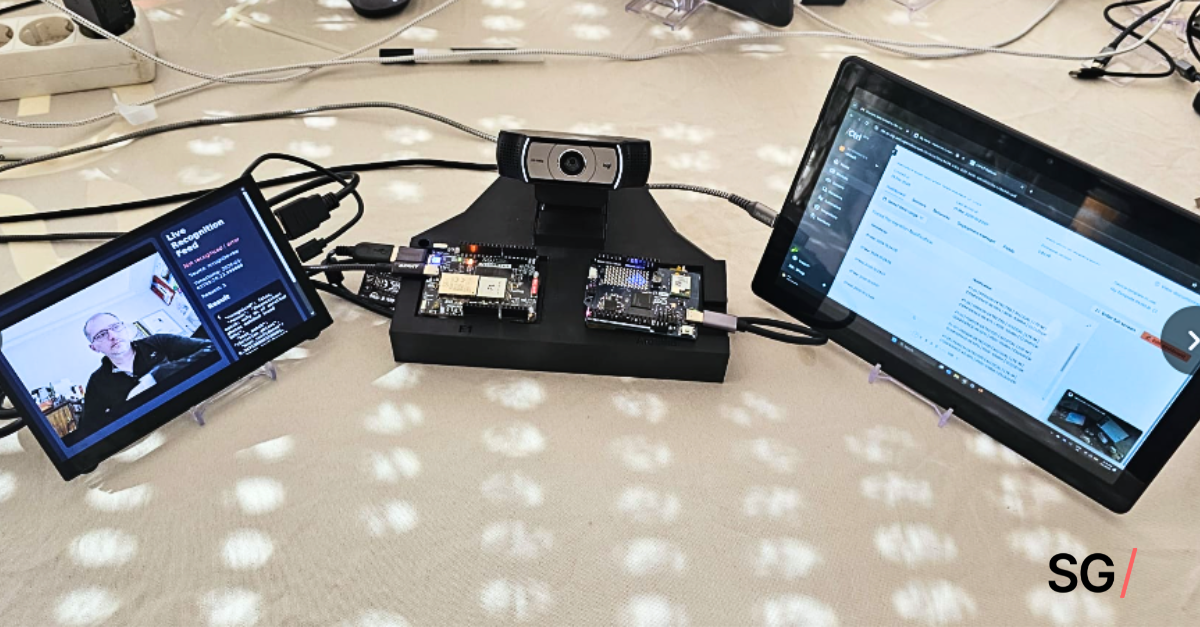
At the edge layer, the SG Wireless F1 Starter Kit handled local person detection using an INT8-quantized TensorFlow MobileNet SSD model optimized for embedded deployment. The challenge was ensuring inference remained stable while communication, buffering, retries and logging were all running simultaneously within embedded resource limits.
Key design decisions at the edge included:
- Local inference execution to avoid cloud-dependent response latency
- Event-based output instead of continuous image streaming
- Pre-processing and confidence filtering to reduce unnecessary transmission load
Layer 2: LTE-M / NB-IoT for Connectivity
Connectivity was handled through the Sequans GM02S Monarch 2 platform using LTE-M / NB-IoT. Earlier development exposed how quickly unstable connectivity can affect embedded system behavior, especially once retries, latency variation and buffering begin competing for resources alongside inference tasks.
To reduce this impact, we designed the communication layer around transmitting lightweight events rather than maintaining continuous cloud synchronization.
Key connectivity considerations included:
- Small event payloads to keep bandwidth usage predictable
- Local event buffering during temporary network interruptions
- Decoupling transmission timing from inference execution
Layer 3: Cloud Visibility Without Cloud Dependency
The cloud layer handled monitoring, event visibility and audit logging, but it was intentionally removed from the real-time operational path. The system continued running locally even during connectivity interruptions, with events queued and transmitted once communication recovered.
Separating cloud orchestration from device-side operation was one of the most important architectural decisions we made for the system.
Key cloud-layer considerations included:
- Cloud used for monitoring and orchestration, not real-time inference
- Buffered event synchronization during connectivity loss
- Centralized visibility without introducing operational dependency